

Samtidiga vektorer Egenskaper, exempel och övningar
- 3763
- 784
- PhD. Emil Svensson
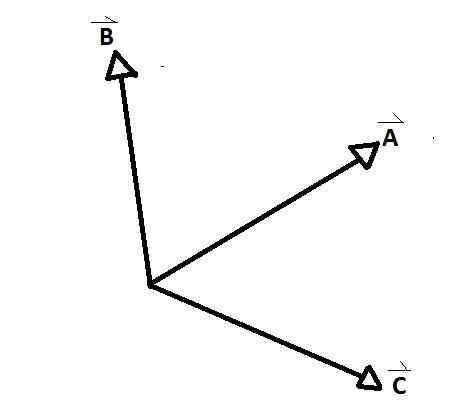
De samtidiga vektorer De är de grupper av vektorer vars axlar sammanfaller vid en punkt och bildar mellan varje par av dem en inre och en yttre vinkel. Ett tydligt exempel observeras i den nedre figuren, där A, B och C är samtidiga vektorer med varandra.
D och E till skillnad från resten är det inte. Det finns vinklar bland samtidiga vektorer AB, AC och CB. Relationsvinklar mellan vektorer kallas.
[TOC]
Egenskaper
-De har en gemensam punkt, som sammanfaller med sitt ursprung: alla storlekar på de samtidiga vektorerna börjar från en gemensam punkt till deras respektive ytterligheter.
-Ursprunget betraktas som vektoråtgärdspunkten: En handlingspunkt måste fastställas som kommer att påverkas direkt av var och en av de samtidiga vektorerna.
-Din domän i planet och rymden är R2 och r3 respektive: samtidiga vektorer är fria att täcka hela geometriska utrymmet.
-Tillåter olika notationer i samma grupp av vektorer. Enligt studiens grenar finns olika notationer i operationer med vektorer.
Typer av vektorer
Vektorns gren har flera underavdelningar, bland vissa kan de utses: den parallella, vinkelräta, coplanarios, motsvarande, motsatt och enhetlig. Samtidiga vektorer visas på denna lista och som alla de tidigare utsedda har de många applikationer inom olika vetenskaper.
De är mycket vanliga i vektorstudien, eftersom de representerar en lönsam generalisering i operationerna med dem. Både i planet och i rymden är samtidiga vektorer för aktuell användning för att representera olika element och studera deras inflytande på ett visst system.
Vektorotation
Det finns olika sätt att representera ett vektorelement. De viktigaste och mest kända är:
Kartes
Föreslagen av samma matematiska tillvägagångssätt anger vektorer med en lista som motsvarar storleken på varje axel (x, y, z)
A: (1, 1, -1) Utrymme A: (1, 1) Plan
Polär
De tjänar bara till att beteckna vektorer i planet, även om i den integrerade beräkningen är djupkomponenten tilldelad. Den består med en linjär storlek r och en vinkel med avseende på den polära axeln Ɵ.
Kan tjäna dig: Inferential Statistics: Historia, Egenskaper, vad är det för, exempelA: (3, 450 ) Planera A: (2, 450 , 3)
Analytisk
Definiera vektorns storlek genom versorn. Versorerna (R&E + K) representerar enhetsvektorerna som motsvarar axlarna X, y och
A: 3i + 2J - 3K
Sfärisk
De liknar polär notation, men med tillägget av en andra vinkel som sveper på planet Xy symboliserad av Δ.
A: (4, 60antingen , π/4)
Operationer med samtidiga vektorer
Samtidiga vektorer används mest för att definiera operationer mellan vektorer, eftersom det är lättare att jämföra elementen i vektorerna när de förekommer på ett samtidigt sätt.
Summa (A + B)
Summan av samtidiga vektorer syftar till att hitta den resulterande vektorn Vr. Som enligt studiens gren motsvarar en slutlig åtgärd
Till exempel: 3 strängar är bundna a, b, c till en låda, varje ände av repet är i händerna på ett ämne. Var och en av de tre försökspersonerna måste dra repet i en annan riktning än de andra 2.
A: (AX, AY, AZ) B: (BX, BY, BZ) C: (CX, CY, CZ)
A+b+c = (ax+bx+cx; ay+av+cy; az+bz+cz) = Vr
Lådan kan därför bara röra sig i en riktning Vr kommer att ange riktningen och känslan av förskjutningen av lådan.
Skillnad (a - b)
Det finns många kriterier när det gäller skillnaden mellan vektorer, många författare väljer att utesluta det och hävda att endast summan mellan vektorer föreskrivs, där skillnaden är summan av motsatt vektor. Sanningen är att algebraiskt vektorer kan subtraheras.
A: (AX, AY, AZ) B: (BX, BY, BZ)
A-b = a + (-b) = (ax-bx; ay-be; az-bz) = [ax + (-bx); ay + (-by); az + (-bz)]
Skalprodukt (a . B)
Även känd som Punto Product, genererar ett skalvärde som kan relateras till flera storlekar enligt studiegrenen.
För geometri indikerar det parallellogramområdet som bildas av par av samtidiga vektorer genom parallellogrammetoden. För mekanisk fysik definierar det arbete som gjorts av en styrka F Genom att flytta en kropp ett avstånd ΔR.
Det kan tjäna dig: sammansatt proportionalitet: Förklaring, tre sammansatta regel, övningarѡ = f . ΔR
Som namnet antyder genererar det ett skalvärde och definieras på följande sätt:
Vara vektorerna a och b
A: (AX, AY, AZ) B: (BX, BY, BZ)
-Analytisk form:
(Till . B) = | a |.| B |.Cos θ
Där θ är den inre vinkeln mellan båda vektorerna
-Algebraisk form:
(Till . B) = (yxa.Bx + ay.av + az.Bz)
Vektorprodukt (a x b)
Vektorn eller punktprodukten mellan två vektorer, definierar en tredje vektor C som har kvaliteten på att vara vinkelrätt mot B och C. I fysik definierar vektormomentet τ Baselement i rotationsdynamiken.
-Analytisk form:
| A X B | = | A |.| B |.Synd θ
-Algebraisk form:
(A x b) = = (Yxa . av - Ay . bx)- (yxa . BZ - AZ . bx) J + (Yxa . av - Ay . bx) k
-Relativ rörelse: RA/b
Grunden för relativitet är den relativa rörelsen och de samtidiga vektorerna är grunden för den relativa rörelsen. Du kan härleda positioner, hastigheter och relativa accelerationer genom att tillämpa följande idéordning.
r A/b = rTILL - rB ; Relativ position angående B
v A/b = vTILL - vB ; Relativ hastighet av respekt för B
till A/b = aTILL - tillB ; Relativ acceleration av respekt för B
Exempel: Löst övningar
Övning 1
Låt A, B och C samtidiga vektorer.
A = (-1, 3, 5) B = (3, 5, -2) C = (-4, -2, 1)
-Definiera den resulterande vektorn Vr = 2a - 3b + c
2a = (2 (-1), 2 (3), 2 (5)) = (-2, 6, 10)
-3B = (-3 (3), -3 (5), -3 (-2)) = (-9, -15, 6)
Vr = 2a + (-3b) + c = (-2, 6, 10) + (-9, -15, 6) + (-4, -2, 1)
Vr = ([-2+(-9)+(-4)]; [6+(-15)+(-2)]; (10+6+1))
Vr = (-15, -11, 17)
-Definiera skalprodukten (a . C)
(Till . C) = (-1, 3, 5) . (-4, -2, 1) = (-1) (-4) + 3 (-2) + 5 (1) = 4 -6 + 5
(Till . C) = 3
-Beräkna vinkeln mellan A och C
(Till . C) = | a |.| C |.Cos θ där θ är den kortaste vinkeln bland vektorerna




θ = 88,630
-Hitta en vektor vinkelrätt mot A och B
För detta är det nödvändigt att definiera vektorprodukten mellan (-1, 3, 5) och (3, 5, -2). Som förklarats tidigare byggs en 3 x 3 -matris där den första raden består av listan över enhetsvektorer (I, J, K). Sedan består den 2: a och 3: e raden av vektorerna som ska drivas, respekterar den operativa ordningen.
Kan tjäna dig: decimal notation(A x b) = = [(-1) . 5 - (3 . 3)]] Yo - [(-1) . (-2) - (5 . 3)]] J + [(-1) . 5 - (3 . 3)]] k
(A x b) = (-5 - 9) Yo - (2 - 15) J + (-5 - 9) k
(A x b) = -14 I + 13 J - 14 K
Övning 2
Låt Vtill och vb Hastighetsvektorerna för A respektive B. Beräkna B -hastigheten från en.
Vtill = (3, -1, 5) vb = (2, 5, -3)
I detta fall begärs den relativa hastigheten på B från VB/a
VB/a = VB - VTILL
VB/a = (2, 5, -3) -(3, -1, 5) = (-1, 6, -8)
Detta är veloc -vektorn för B sett från en. Där en ny vektor av B -hastigheten beskrivs med referens av en observatör placerad i A och rör sig med hastigheten på en.
Föreslagna övningar
1-konstruktion 3 vektorer A, B och C som är samtidiga och relaterar 3 operationer mellan dem genom en praktisk övning.
2 -Vektorer A: (-2, 4, -11), B: (1, -6, 9) och C: (-2, -1, 10). Hitta vinkelräta vektorer till: A och B, C och B, Sum A + B + C.
4-bestämmare 3 vektorer som är vinkelräta mot varandra utan att ta hänsyn till koordinataxlarna.
5-definiera det arbete som gjorts av en kraft som lyfter ett 5 kg massblock, från botten av en 20 m djup brunn.
6-Swamker Algebraic att subtraktionen av vektorer är lika med summan av motsatt vektor. Motivera dina postulater.
7 Denotera en vektor i alla notationer som utvecklats i den här artikeln. (Cartesian, Polar, Analytics och Sfärical).
8-Magnetkrafterna som utövas på en magnet som vilar på ett bord ges av följande vektorer; V: (5, 3, -2), T: (4, 7, 9), H: (-3, 5, -4). Bestäm i vilken riktning magneten kommer att röra sig om alla magnetiska krafter verkar samtidigt.
Referenser
- Euklidisk geometri och transformationer. Clayton w. Undvika. Couer Corporation, 1 jan. 2004
- Hur man löser tillämpning av matematikproblem l. Moiseiwitsch. Couer Corporation, 10 april. 2013
- Grundläggande geometri. Walter Prenowz, Meyer Jordan. Rowman & Littlefield, 4 oktober. 2012
- Vektorerna. Rocío Navarro Lacoba, 7 juni. 2014
- Linjär algebra. Bernard Kolman, David R. Kulle. Pearson Education, 2006
- « Timolftalinegenskaper, förberedelser och applikationer
- Atomismhistoria, teori, postulat och representanter »