

Vektoralgebra
- 4022
- 1024
- Lars Eriksson
Vad är vektoralgebra?
han Vektoralgebra Det är en gren av matematik som ansvarar för att studera system med linjära ekvationer, vektorer, matriser, vektorutrymmen och deras linjära transformationer. Det är relaterat till områden som teknik, upplösning av differentiella ekvationer, funktionell analys, operationsforskning, beräkningsgrafik, bland andra.
Ett annat av de områden som den linjära algebra har antagit är fysik, eftersom det genom detta har varit möjligt att utveckla studien av fysiska fenomen och beskriva dem genom användning av vektorer. Detta har möjliggjort en bättre förståelse av universum.
Grundläggande
Vektoralgebra härstammar från studien av kvaternioner (förlängning av de verkliga siffrorna) 1, I, J och K, liksom den kartesiska geometri som främjas av Gibbs och Heaviside, som insåg att vektorerna skulle tjäna som ett instrument för representant flera fysiska fenomen.
Vektoralgebra studeras genom tre stiftelser:
Geometriskt
Vektorer representeras av linjer som har en orientering, och operationer som summa, subtraktion och multiplikation med verkliga siffror definieras genom geometriska metoder.
Analytiskt
Beskrivningen av vektorerna och deras verksamhet utförs med siffror, kallade komponenter. Denna typ av beskrivning är resultatet av en geometrisk representation eftersom ett koordinatsystem används.
Axiomatiskt
En beskrivning av vektorerna görs, oavsett koordinatsystem eller någon typ av geometrisk representation.
Studien av siffror i rymden görs genom dess representation i ett referenssystem, som kan vara i en eller flera dimensioner. Bland huvudsystemen är:
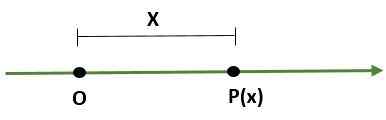
- Ojämnt system, att det är en linje där en punkt (eller) representerar ursprunget och en annan punkt (p) bestämmer skalan (längden) och riktningen för detta:
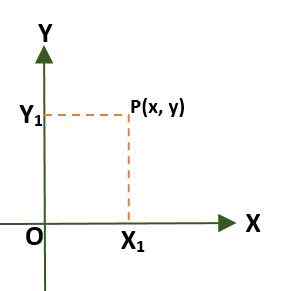
- Rektangulärt koordinatsystem (två -dimensionell), som består av två vinkelräta linjer som kallas X- och Y -axel, som passerar genom ett punkt (eller) ursprung; På detta sätt är planen uppdelad i fyra regioner som kallas kvadranter. I detta fall ges en punkt (P) i planet av de avstånd som finns mellan axlarna och P.
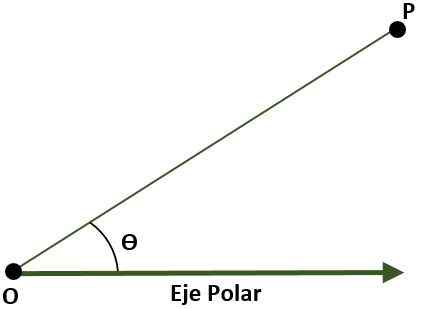
- Polär koordinatsystem (två -dimensionell). I detta fall består systemet av en punkt o (ursprung) som kallas pol och en halv -fleor med ursprung i eller kallas polär axel. I detta fall ges punkten P i planet, med hänvisning till polen och den polära axeln, av vinkeln (ɵ), som bildas av avståndet mellan ursprunget och punkten P.
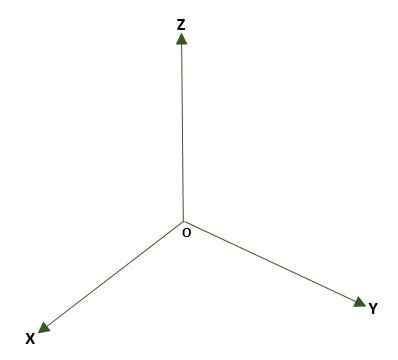
- Rektangulärt tre -dimensionellt system, bildas av tre vinkelräta linjer (x, y, z) som har som sin poäng eller i rymden. Tre koordinatplan bildas: XY, XZ och YZ; Utrymmet kommer att delas upp i åtta regioner som kallas oktants. Hänvisningen till en punkt P i utrymmet ges av de avstånd som finns mellan planen och P.
Storhet
En storlek är en fysisk mängd som kan räknas eller mätas genom ett numeriskt värde, som för vissa fysiska fenomen; Det är emellertid ofta nödvändigt att beskriva dessa fenomen med andra faktorer som inte är numeriska. Det är därför storleken klassificeras i två typer:
Skalarstorlek
De är de belopp som är definierade och representerar på ett numeriskt sätt; det vill säga med en modul tillsammans med en måttenhet. Till exempel:
a) Tid: 5 sekunder.
b) Massa: 10 kg.
c) Volym: 40 ml.
d) Temperatur: 40 ºC.
Vektorstorlek
De är de belopp som definieras och representeras av en modul tillsammans med en enhet, liksom av en känsla och riktning. Till exempel:
Kan tjäna dig: symbolisering av uttrycka) Hastighet: (5ȋ - 3ĵ) m/s.
b) Acceleration: 13 m /s2; S 45º E.
c) kraft: 280 n, 120º.
d) Vikt: -40 ĵ kg -f.
Vektorstorlekar representeras grafiskt av vektorer.
Vad är vektorer?
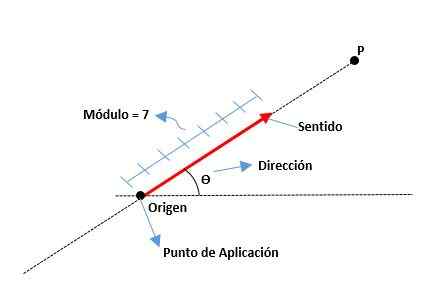
Vektorer är grafiska representationer av en vektorstorlek; det vill säga de är linjesegment där dess slutliga slut är spetsen på en pil.
Dessa bestäms av dess modul eller längd på segmentet, deras känsla som indikeras av spetsen på dess pil och dess riktning enligt den linje som den tillhör. Ursprunget till en vektor kallas också tillämpningspunkten.
Elementen i en vektor är följande:
Modul
Det är avståndet från ursprunget till slutet av en vektor, representerad av ett riktigt nummer tillsammans med en enhet. Till exempel:
| Om | = | A | = A = 6 cm
Adress
Det är måtten på vinkeln som finns mellan x -axeln (från den positiva) och vektorn, såväl som kardinalpunkterna (norr, söder, öst och väst) används också.
Känsla
Det ges av pilspetsen som ligger i slutet av vektorn, vilket indikerar var detta är riktat.
Klassificering av vektorer
Generellt klassificeras vektorer som:
Fast vektor
Det är den vars applikationspunkt (ursprung) är fixerad; det vill säga det förblir kopplat till ett utrymme, så det kan inte röra sig i detta.
Fri vektor
Det kan röra sig fritt i rymden eftersom ursprunget rör sig till vilken punkt som helst utan att ändra sin modul, mening eller riktning.
Glidvektor
Det är en som kan överföra sitt ursprung längs sin handlingslinje utan att ändra sin modul, betydelse eller riktning.
Vektoregenskaper
Bland de viktigaste egenskaperna hos vektorerna är följande:
Ekvektor
De är de fria vektorerna som har samma modul, riktning (eller dessa är parallella) och avkänsla som en glidvektor eller en fast vektor.
Motsvarande vektorer
Det inträffar när två vektorer har samma adress (eller är parallella), samma känsla, och trots att de har olika moduler och applikationspunkter orsakar de lika effekter.
Jämställdhet
Dessa har samma modul, riktning och känsla, även när deras utgångspunkter är olika, vilket gör att en parallellvektor kan flytta till sig själv utan att påverka den.
Motsatta vektorer
De är de som har samma modul och riktning, men deras betydelse är motsatt.
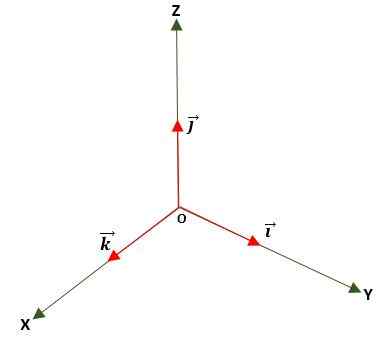
Enhetsvektor
Det är en där modulen är lika med enhet (1). Detta erhålls genom att dela vektorn med sin modul och används för att bestämma riktningen och riktningen för en vektor, antingen i planet eller i rymden, med hjälp av de standardiserade basen eller enhetsvektorerna, som är:
Nollvektor
Det är den vars modul är lika med 0; det vill säga dess ursprungspunkt och extrem sammanfaller vid samma punkt.
Vektorkomponenter
Komponenterna i en vektor är dessa värden på vektorprognoserna på referenssystemets axlar; Beroende på nedbrytningen av vektorn, som kan vara i axlar på två eller tre dimensioner, kommer två eller tre komponenter att erhållas respektive.
Komponenterna i en vektor är verkliga siffror, vilket kan vara positiva, negativa eller till och med noll (0).
På detta sätt, om du har en ā -vektor, som härstammar i ett rektangulärt koordinatsystem i xy (två -dimensionellt) plan, är projektionen på x -axeln āx och projektionen på y -axeln och är āy. Således kommer vektorn att uttryckas som summan av dess komponentvektorer.
Exempel
Första exemplet
Du har en ā -vektor som börjar från ursprunget och koordinaterna för dess ändar ges. Således vektorn ā = (āx; TILLoch) = (4; 5) cm.
Kan tjäna dig: 120 delare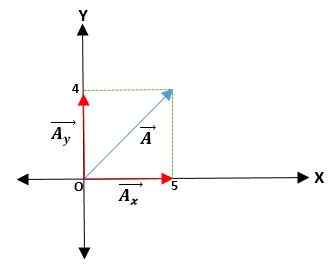
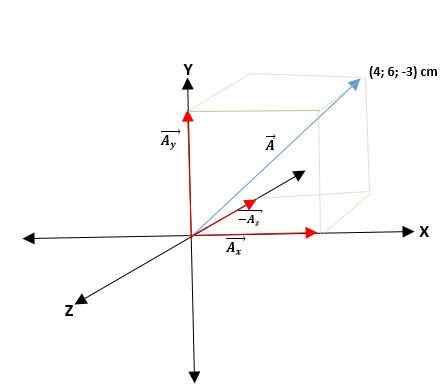
Om vektorn ā verkar vid ursprunget till ett tre -dimensionellt triangulärt koordinatsystem (i rymden) x, y, z, till en annan punkt (p), kommer prognoserna på deras axlar att vara āx, āy och āz; Således kommer vektorn att uttryckas som summan av dess tre komponentvektorer.
Andra exempel
Du har en ā -vektor som börjar från ursprunget och koordinaterna för dess ändar ges. Således vektorn ā = (ax; TILLoch; TILLz) = (4; 6; -3) cm.
Vektorer som har sina rektangulära koordinater kan uttryckas enligt deras basvektorer. För det måste endast varje koordinat multipliceras med respektive enhetsvektor, så att de för planet och utrymmet kommer att vara följande:
För planet: ā = axi +aochJ.
För utrymme: ā = axi +aochJ+Azk.
Operationer med vektorer
Det finns många storlekar som har modul, betydelse och riktning, såsom acceleration, hastighet, förskjutning, kraft, bland andra.
Dessa tillämpas inom olika vetenskapsområden, och för att tillämpa dem är det i vissa fall nödvändigt att utföra operationer som summa, subtraktion, multiplikation och uppdelning av vektorer och skalor.
tillägg och subtraktion av vektorer
Summan och subtraktionen av vektorer betraktas som en enda algebraisk operation eftersom subtraktion kan skrivas som en summa; Till exempel kan subtraktionen av vektorer ā och ē uttryckas som:
Ā - ē = ā + (-ē)
Det finns olika metoder för att utföra summan och subtraktionen av vektorer: de kan vara grafik eller analys.
Grafiska metoder
Används när en vektor har en modul, känsla och riktning. För detta dras linjer som bildar en figur som därefter hjälper till att bestämma det resulterande. Bland de mest kända är följande:
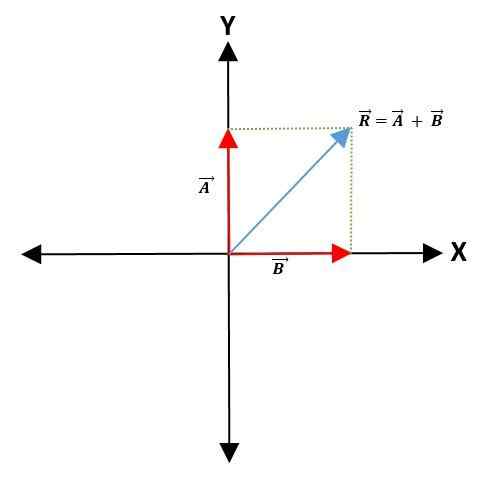
Parallellogrammetod
För att göra summan eller subtraktionen av två vektorer väljs en gemensam punkt på koordinataxeln -som kommer att representera vektorens ursprungspunkt -och upprätthålla sin modul, riktning och riktning.
Sedan dras parallella linjer till vektorerna för att bilda ett parallellogram. Den resulterande vektorn är diagonalen som lämnar från ursprungspunkten för båda vektorerna till parallellogramets toppunkt:
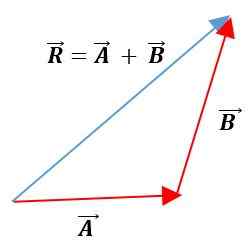
Triangelmetod
I denna metod placeras vektorerna under den andra och bibehåller sina moduler, sinnen och adresser. Den resulterande vektorn kommer att vara föreningen av ursprunget till den första vektorn i slutet av den andra vektorn:
analytiska metoder
Två eller flera vektorer kan läggas till eller subtraheras genom en geometrisk eller vektormetod:
Geometrisk metod
När två vektorer bildar en triangel eller parallellogram kan M [odulo och riktningen för den resulterande vektorn bestämmas med hjälp av bröst och kosinus lagar. Således ges den resulterande vektormodulen, som tillämpar lagen om kosinus och med triangelmetoden, av:
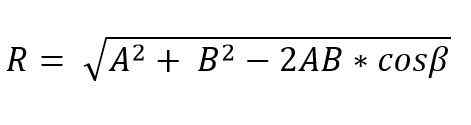
I denna formel är ß motsatt vinkel mot R -sidan, och detta är lika med 180º - ɵ.
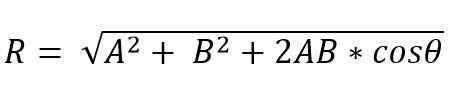
Å andra sidan är den resulterande vektormodulen med parallellogrammetoden:
Den resulterande vektoradressen ges av vinkel (α), som bildar den resulterande med en av vektorerna.
Enligt bröstlagen kan summan eller subtraktionen av vektorer också göras med triangeln eller parallellogrammetoden, med vetskap om att i varje triangel är sidorna proportionella mot brösten i de stiliga vinklarna:
Vektormetod
Detta kan göras på två sätt: beroende på dess rektangulära koordinater eller dess basvektorer.
Vektorerna som kommer att läggas till eller subtraheras mot koordinaternas ursprung kan göras, och sedan bryts alla prognoser ner i sina rektangulära komponenter i var och en av axlarna för planet (x, y) eller utrymme (x, x, och z); Slutligen tillsätts dess komponenter algebraiskt. Så för planet är det:
Kan tjäna dig: Primo -nummer: Egenskaper, exempel, övningar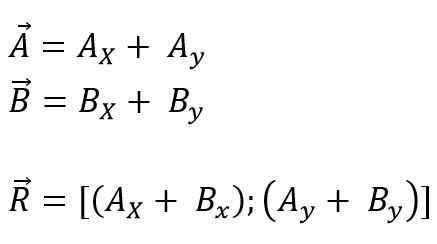
Den resulterande vektormodulen är:
Medan för rymden är det:
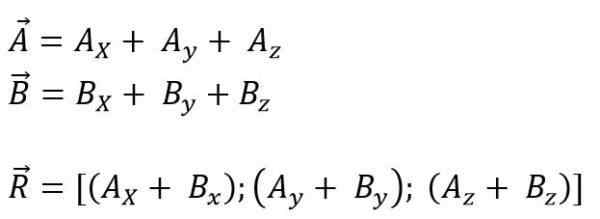
Den resulterande vektormodulen är:

När vektor summor utförs tillämpas flera egenskaper, vilka är:
- Associativ egenskap: Resultatet förändras inte genom att lägga till två vektorer först och sedan lägga till en tredje vektor.
- Mätfast: Vektors ordning förändrar inte det resulterande.
- Vektorfördelningsegenskap: Om en skalar multipliceras med summan av två vektorer är den lika med multiplikationen av skalaren för varje vektor.
- Distribuerande fastighetsskalor: Om en vektor multipliceras med summan av två skalor är den lika med multiplikationen av vektorn för varje skalar.
Vektormultiplikation
Multiplikationen eller produkten från vektorer kan utföras som summa eller subtraktion, men därmed förlorar den den fysiska betydelsen och är nästan aldrig inom applikationerna. Därför är de mest använda typerna av produkter den skalära och vektorprodukten.
Skalprodukt
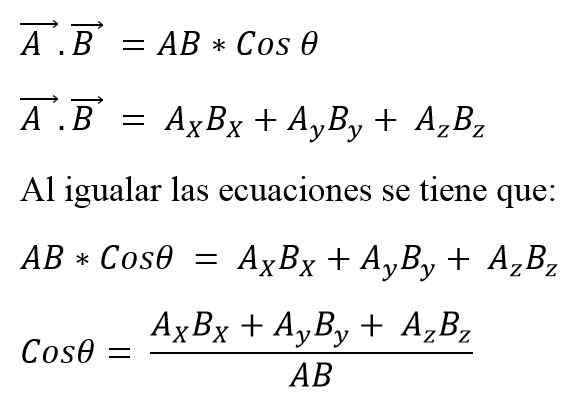
Det är också känt som en punkt för två vektorer. När de två vektormodulerna multipliceras med den mindre vinkelkosinus som bildas mellan dem, erhålls en skalar. För att uttrycka en skalprodukt mellan två vektorer placeras en punkt mellan dem, och detta kan definieras som:
Värdet på vinkeln som finns mellan de två vektorerna beror på om dessa är parallella eller vinkelräta; Således måste du:
- Om vektorerna är parallella och har samma känsla, koseno 0º = 1.
- Om vektorerna är parallella och har motsatta sinnen, coseno 180º = -1.
- Om vektorerna är vinkelräta, koseno 90º = 0.
Den vinkeln kan också beräknas med att veta att:
Scalar -produkten har följande egenskaper:
- Kommutativ egendom: Vektors ordning ändrar inte skalaren.
- Distributivegenskap: Om en skalar multipliceras med summan av två vektorer är den lika med multiplikationen av skalar för varje vektor.
Vektorprodukt
Vektormultiplikationen, eller tvärprodukt från två vektorer A och B, kommer att resultera i en ny vektor C och uttrycker att använda ett kors bland vektorerna:
Den nya vektorn kommer att ha sina egna egenskaper. På det sättet:
- De adress: Denna nya vektor kommer att vara vinkelrätt mot planet, som bestäms av de ursprungliga vektorerna.
- han känsla: Detta bestäms med högerhandregeln, där vektorn A vrids till B som påpekar rotationsriktningen med fingrarna, och med tummen är vektorns riktning markerad.
- han modul: Det bestäms av multiplikationen av modulerna för AxB -vektorerna, av bröstet i den mindre vinkeln som finns mellan dessa vektorer. Det uttrycks:
Värdet på vinkeln som finns mellan de två vektorerna beror på om dessa är parallella eller vinkelräta. Så det är möjligt att bekräfta följande:
- Om vektorerna är parallella och har samma betydelse, sinus 0º = 0.
- Om vektorerna är parallella och har motsatta sinnen, sinus 180º = 0.
- Om vektorerna är vinkelräta, sinus 90º = 1.
När en vektorprodukt uttrycks enligt dess basvektorer måste den:

Scalar -produkten har följande egenskaper:
- Det är inte kommutativt: Vektorens ordning förändrar skalaren.
- Distributivegenskap: Om en skalar multipliceras med summan av två vektorer är den lika med multiplikationen av skalar för varje vektor.