

Vinkelmomentkvantitet, bevarande, exempel, övningar
- 3944
- 946
- PhD. Emil Svensson
han vinkelmoment o Mängden vinkelrörelse är för rotationsrörelsen vad det linjära ögonblicket är för översättningsrörelsen. Det är en vektorstorlek som kännetecknar rotationen av en punktlig partikel eller ett utökat objekt runt en axel som passerar genom en punkt.
Detta innebär att när vinkelmomentet kommer att beräknas måste rotationsaxeln specificeras bekvämt.
Börjar med en materiell massa massa m, betecknas vinkelmomentet av L, det linjära ögonblicket som p och partikelns position med avseende på en axel som passerar genom en viss punkt eller är r, så:
L = r x p
Djärva bokstäver är reserverade för vektorstorlekar och korset innebär att vinkelmomentet är vektorprodukten mellan positionsvektorn r och det linjära ögonblicket p av partikeln. Vektorn som är resultatet av en vektorprodukt är vinkelrätt mot det plan som bildas av de deltagande vektorerna.
Detta innebär att riktningen och känslan av L De kan hittas genom regel om höger hand för tvärprodukten.
I det internationella enhetssystemet är enheterna i vinkelmomentet kg⋅m2/s, som inte har ett speciellt namn. Och för en utökad kropp, som består av många partiklar, är den föregående definitionen bekvämt utökar.
[TOC]
Vinkelrörelse
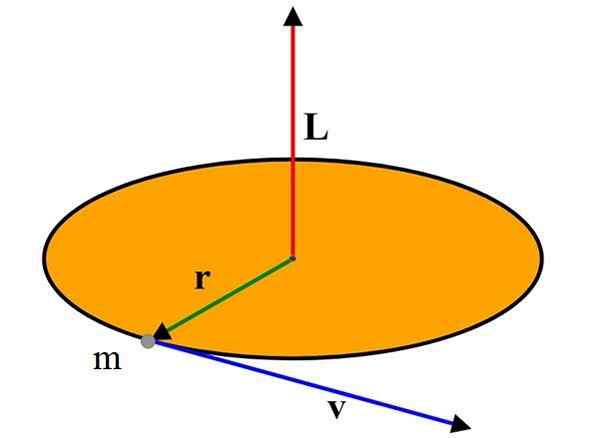
Förhållandet mellan vinkelmomentvektorerna med avseende på en given punkt eller linjär tid för en punktlig partikel som rör sig i en cirkel. Källa: modifierad av f. Zapata från Wikimedia Commons. Storleken på vinkelmomentvektorn är enligt definitionen av vektorprodukt:
L = r⋅m⋅v⋅sen ϕ = mv (r⋅sen ϕ) = mvℓ
Där ϕ är vinkeln mellan vektorerna r och v. Då ℓ = r sen ϕ är det vinkelräta avståndet mellan linjen för v Och poängen eller.
När det gäller partikeln som rör sig som beskriver omkretsen som visas i den övre bilden är denna vinkel 90º, eftersom hastigheten alltid är tangent för omkretsen och därför vinkelrätt mot radien.
Därför sen 90º = 1 och storleken på L är:
L = m⋅r⋅v
Tröghetsmomentet
Momentet av tröghet hos en styv kropp beskriver kroppens tröghet mot rotation runt en viss axel.
Det beror inte bara på kroppens kropp utan också på avståndet till rotationsaxeln. Detta är lätt att förstå när man tänker att det för vissa föremål är lättare att rotera med avseende på vissa axlar än till andra.
För ett partikelsystem ges tröghetsmomentet, betecknat med brev I, av:
Kan tjäna dig: vinkelaccelerationI = ∑ rYo2 ΔmYo
Var ΔmYo Det är en liten del av degen och rYo Det är dess avstånd från rotationsaxeln. En utökad kropp består av många partiklar, därför är dess moment av total tröghet summan av alla produkter mellan massa och avstånd, av partiklarna som komponerar den.
Om det är en utökad kropp ändras sommaren till en integral och Δm Det blir en massdifferential Dm. Integrationsgränser beror på objektgeometri:
I = ∫M (r2) DM
Begreppet tröghetsmoment är nära besläktat med ett utökat objekts vinkelmoment, som vi kommer att se då.
Vinkelmoment i ett partikelsystem
Tänk på ett partikelsystem som består av massa ΔmYo som roterar efter en cirkel i planet Xy, Var och en har en linjär hastighet relaterad till sin vinkelhastighet, den senare för alla partiklar:
vYo = ΩrYo
Där rYo Det är avståndet till rotationsaxeln eller. Så storleken på vinkelmomentet är:
LYo = ΔmYo. rYo. (ΩrYo) = rYo2Ω ΔmYo
Systemets vinkelmoment kommer att ges av summan:
L = Ω ∑ rYo2 ΔmYo
Vi identifierar snabbt tröghetsmomentet, enligt definitionen i föregående avsnitt, och därför förblir storleken på dess vinkelmoment så här:
L = iΩ
Som vi har sagt att partikelsystemet var i XY -planet visar det sig att vinkelmomentet riktas längs Z -axeln, vinkelrätt mot nämnda plan. Betydelsen ges av rotationen: det vinklade ögonblicket.
En utökad kropp kan delas upp i skivor, var och en med vinkelmoment som ges av L = iΩ riktad längs z -axeln. Om objektsymmetriaxeln sammanfaller med Z -axeln finns det inga problem, eftersom även för punkter som inte finns i XY -planet, avbryts komponenterna i vinkelmomentet till nämnda axel.
Vektoriellt:
L = JagΩ
Denna ekvation är giltig för tre dimensionella objekt som kretsar kring en symmetriaxel.
När vinkelmomentet varierar?
När en nettokraft verkar på en partikel eller en kropp kan dess linjära ögonblick förändras, och följaktligen kommer det också att göra sitt vinkelmoment. För att veta när vi varierar använder vi derivatet, vilket ger oss förändringshastigheten över tid, om det finns:
Kan tjäna dig: kiseloxid (SiO2): struktur, egenskaper, användningar, erhållning)
Tillämpa produktregeln för derivatet:
+\left&space;(\mathbfr\times&space;\fracd\mathbfpdt&space;\right&space;))
Termen v x mv Det är ogiltigt, eftersom det är produkten från en vektor med sig själv, och under den andra terminen hittar vi nettokraften F = mtill, därför:

Vektorprodukten r x F Det är inget annat än vridmomentet eller ögonblicket för netto torsion, ibland betecknad med de grekiska texterna τ eller som M, Alltid djärvt, eftersom det är en vektorbelopp. Sedan, i analogi med det linjära ögonblicket, varierar vinkelmomentet så länge det finns ett vridmoment eller ett ögonblick av netto torsion:
dL/dt = M
Vinkande momentum bevarande
Från de föregående avsnitten har vi sett det:
dL/dt = M
Det vill säga vinkelmomentet varierar när det finns ett ögonblick av netto torsion. Om det inte finns något ögonblick av netto torsion, då:
dL/dt = 0 → L det är konstant
Med andra ord:
Initial vinkelmoment = slutlig vinkelmoment
Detta resultat är fortfarande giltigt i händelse av att en kropp inte är styv, som vi kommer att se i följande exempel.
Exempel
Vinkelmomentet är en viktig storlek som avslöjas i många situationer, som visar hur universellt det är:
Konstnärlig skridskoåkning och andra sporter
 Till vänster börjar skateren vända sig med utökade armar, till höger, krymper armarna mot kroppen och korsar benen för att öka svänghastigheten. Källa: Wikimedia Commons.
Till vänster börjar skateren vända sig med utökade armar, till höger, krymper armarna mot kroppen och korsar benen för att öka svänghastigheten. Källa: Wikimedia Commons. Närhelst en kropp som vänder kontrakt ökar dess rotationshastighet, detta känner till skridskoskidorna väl.
Detta beror på att när vi samarbetar med armar och ben, tröghetsmomentet minskar jag, när avståndet mellan dess delar minskar, men när vinkelmomentet bevaras, för att hålla IΩ -produkten konstant, måste vinkelhastigheten öka.
Detta är giltigt inte bara i skridskoåkning, utan också i sport och aktiviteter där vändningar måste.
Katter står

Katter fixar dem alltid för att landa på alla fyra när de faller. Även om de inte har en mängd första rörelse, ser de till att de snabbt vänder benen och svansen för att ändra sin rotationströghet och fixa dem för att stå upp.
Likaså medan manövrering är deras vinkelmoment ogiltigt, eftersom deras rotation inte är kontinuerlig.
Rörelsen av en frisbee

En frisbee måste lanseras genom att skriva ut den för att flyga, eftersom det annars faller. Faktiskt det vinklade ögonblicket.
Det kan tjäna dig: stationära vågor: formler, egenskaper, typer, exempelBollarna i sport

Baseball, fotboll, basket och andra sportbollar har vinkelmoment. Eftersom de är sfäriska har de ett ögonblick av tröghet och under spelet roteras de. Som en sfärs tröghet är:
I = (2/5) MR2
Där m är massan på bollen och r sin radie, är tröghetsmomentet med avseende på en viss axel (fast):
L = (2/5) MR2Ω
Månmonteringen
Månen rör sig bort från jorden, eftersom jordens hastighet minskar på grund av friktionen mellan de stora vattenmassorna och havets bakgrund.
Earth-Luna-systemet behåller sitt vinkelmoment.
Atomen
Det första postulatet av Bohrs atommodell säger att en elektron bara upptar banor där vinkelmomentet är en hel multipel av H/2π, Där h är Plancks konstant.
Träning löst
En tunn stålstång har en massa på 500 g och en längd på 30 cm. Kretsar kring en axel som passerar genom dess centrum med en hastighet av 300 varv per minut. Bestämma modulen för dess mängd vinkelrörelse.
Lösning
Vi kommer att behöva tröghetens tröghet som hänvisar till en axel som passerar genom dess centrum. Att konsultera tröghetsmomentet konstateras att:
I = (1/12) ml2 = (1/12) × 0.5 kg x (30 × 10-2 m)2 = 3.75 × 10-3 kg.m2
Eftersom det är en utökad kropp, som vi känner till vinkelhastigheten, använder vi:
L = iΩ
Innan vi förvandlar vinkelhastighet eller vinkelfrekvens Ω till radianes/s:
Ω = (300 varv/minut) × (1 minut/60 sekunder) x (2π radian/revolution) = 10 π rad/s
Byter ut:
L = 3.75 x10-3 kg⋅m2 × 10 π rad/s = 0.118 kg⋅m2 / s
Referenser
- Bauer, w. 2011. Fysik för teknik och vetenskap. Volym 1. MC Graw Hill.
- Giambattista, a. 2010. Fysik. 2: a. Ed. McGraw Hill.
- Giancoli, D. 2006. Fysik: Principer med applikationer. Sjätte. Ed Prentice Hall.
- Riddare, r. 2017. Fysik för forskare och teknik: En strategistrategi. Pearson.
- Serway, R., Jewett, J. (2008). Fysik för vetenskap och teknik. Volym 1. 7th. Ed. Cengage Learning.
- Tippens, s. 2011. Fysik: koncept och applikationer. Sjunde upplagan. McGraw Hill.
- « Golv och fauna av Afrika representativa arter
- Raault Principle and Formel Law, Exempel, övningar »