

Ortonormala basegenskaper, exempel och övningar
- 1094
- 152
- Erik Eriksson
En Ortonormal bas Den är bildad med vinkelräta vektorer med varandra och vars modul också är värd 1 (enhetsvektorer). Kom ihåg att en bas B i ett vektorutrymme V, Det definieras som en uppsättning linjärt oberoende vektorer som kan generera detta utrymme.
I sin tur är ett vektorutrymme en abstrakt matematisk enhet mellan vars element är vektorer, vanligtvis associerade med fysiska storlekar som hastighet, styrka och förskjutning eller även till matriser, polynom och funktioner.
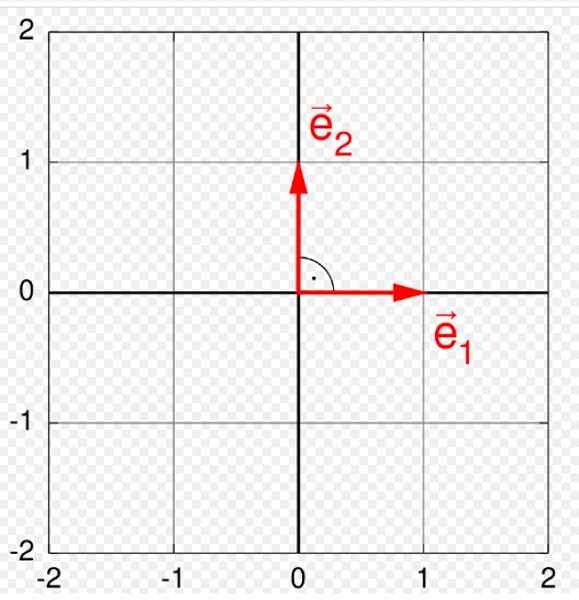
Figur 1. Ortonormal bas i planet. Källa: Wikimedia Commons. Quartl [CC BY-SA (https: // Creativecommons.Org/licenser/BY-SA/3.0)]. Vektorer har tre distinkta element: storlek eller modul, riktning och mening. En ortonormal bas är särskilt användbar för att representera och arbeta med dem, eftersom alla vektor som tillhör ett visst vektorutrymme V, Det kan skrivas som en linjär kombination av vektorerna som bildar den ortonormala basen.
På detta sätt analyseras operationer mellan vektorer, såsom summa, subtraktion och de olika typerna av produkter som definieras i nämnda utrymme analytiskt.
Bland de mest använda baserna i fysik är basen som bildas av enhetsvektorer Yo, J och k Representerar de tre distinkta riktningarna för tre dimensionellt utrymme: hög, bred och djup. Dessa vektorer är också kända med namnet Enhetliga kanoniska vektorer.
Om vektorer istället arbetas på ett plan, räcker det med två av dessa tre komponenter, medan bara en.
[TOC]
Baser egenskaper
1- En bas B Det är den minsta möjliga uppsättningen vektorer som genererar vektorutrymmet V.
2- elementen i B De är linjärt oberoende.
3- Varje bas B av ett vektorutrymme V, gör det möjligt att uttrycka alla vektorer av V Som en linjär kombination av den och denna form är unik för varje vektor. Därför a B Det är också känt som Generatorsystem.
4- Samma vektorutrymme V kan ha olika baser.
Kan tjäna dig: Centrifugalkraft: Formler, hur det beräknas, exempel, övningarExempel på baser
Under flera exempel på ortonormala baser och baser i allmänhet:
Den kanoniska basen i ℜ n
Även kallad naturlig bas eller standardbas för ℜ n, Där ℜ n Det är utrymme n-dimensionell, Till exempel är tre -dimensionellt utrymme ℜ 3. Till n Det kallas dimensionera av vektorutrymmet och betecknar som Dim (v).
Alla vektorer som tillhör ℜ n De representeras av N-usa Beordrade. För rymden ℜn, Den kanoniska basen är:
och1 =; och2 =; ochn =
I det här exemplet har vi använt notationen med konsoler eller "konsoler" och djärva för enhetsvektorer och1, och2, och3..
Den kanoniska basen i ℜ3
Familjevektorer Yo, J och k De medger samma representation och de räcker för tre för att representera vektorerna i ℜ 3:
Yo =; J =; k =
Det betyder att basen kan uttryckas enligt följande:
B = ; ;
För att verifiera att de är linjärt oberoende är den determinanten som bildas med dem vektorer icke -noll och också lika med 1:

F = N = 4Yo -7J + 0k N.
Därför Yo, J och k utgör ett ℜ generatorsystem 3.
Andra ortonormala baser i ℜ3
Standardbasen som beskrivs i föregående avsnitt är inte den enda ortonormala basen i ℜ3. Här har vi till exempel baserna:
B1 = ; ;
B2 = ; ;
Det kan demonstreras att dessa baser är ortonormala, för detta kommer vi ihåg de förhållanden som måste uppfyllas:
Kan tjäna dig: böljande optik-Vektorer som bildar basen måste vara ortogonal för varandra.
-Var och en av dem måste vara enhetliga.
Vi kan verifiera att det vet att den determinanten som bildas av dem måste vara icke -noll och lika med 1.
Bas B1 Det är just det för cylindriska koordinater ρ, φ och z, ett annat sätt att uttrycka vektorer i rymden.
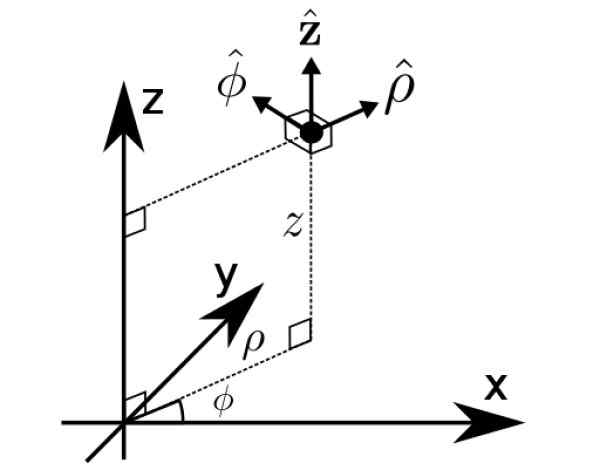 figur 2. Cylindriska koordinater. Källa: Wikimedia Commons. Math Buff [CC BY-S (https: // CreativeCommons.Org/licenser/BY-SA/4.0)].
figur 2. Cylindriska koordinater. Källa: Wikimedia Commons. Math Buff [CC BY-S (https: // CreativeCommons.Org/licenser/BY-SA/4.0)]. Löst övningar
- Övning 1
Visa att basen B = ; ; är ortonormal.
Lösning
För att visa att vektorerna är vinkelräta mot varandra, kommer vi att använda skalprodukten, även kallad intern eller produktpunkt för två vektorer.
Låt alla två vektorer eller och v, Din skalära produkt definieras av:
eller • v = eller.v. cosθ
För att skilja vektorerna från sina moduler kommer vi att använda djärva för de första och normala bokstäverna för de senare. θ är vinkeln mellan eller och v, Därför om de är vinkelräta betyder det att θ = 90º och skalprodukten är ogiltig.
Alternativt, om vektorerna ges i termer av deras komponenter: eller =
eller • v = ellerx .vx + elleroch .voch + ellerz .vz
På detta sätt är de skalära produkterna mellan varje vektorpar, respektive:
i) • = (3/5).(-4/5) + (4/5).((3/5) + 0.0 = (-12/25) + (12/25) = 0
Ii) • = 0
iii) • = 0
För det andra tillståndet beräknas modulen för varje vektor, vilket erhålls av:
│u │ = √ (ux2 + elleroch2 + ellerz2)
Således är modulerna för varje vektor:
│ = √ [(3/5)2 + (4/5)2 + 02)] = √ [(9/25) + (16/25)] = √ (25/25) = 1
│ = √ [(-4/5)2 + (3/5)2 + 02)] = √ [(16/25) + (9/25)] = √ (25/25) = 1
Det kan tjäna dig: Andra jämviktstillstånd: Förklaring, exempel, övningar│ = √ [02 + 02 + 12)] = 1
Därför är de tre enhetsvektorerna. Slutligen är den avgörande faktor som de formar inte noll och lika med 1:

- Övning 2
Skriv vektorkoordinaterna W = När det gäller den tidigare basen.
Lösning
För att göra det används följande teorem:
Låt B = v1, v2, v3,.. vn En ortonormal bas i rymden V med inhemsk produkt, vektorn W Det representeras av B på följande sätt:
W = <W•v1> v1 + <W•v2> v2 +<W•v3> v3 +.. <W•vn> vn
Detta innebär att vi kan skriva vektorn vid bas B, genom koefficienter <W•v1>, <W•v2>, .. <W•vn>, för vilken du måste beräkna de angivna skalorna:
• = (2).(3/5) + (3).(4/5) + 1.0 = (6/5) + (12/5) = 18/5
• = (2).(-4/5) + (3).(3/5) + 1.0 = (-8/5) + (9/5) = 1/5
• = 1
Med de erhållna skalprodukterna byggs en matris, kallad koordinatmatris av W.
Därför koordinerar vektorkoordinaterna W I bas B uttrycks de genom:
[W]B= [(18/5); (1/5); 1]
Koordinatmatrisen är inte vektorn, eftersom en vektor inte är densamma som dess koordinater. Dessa är bara en uppsättning siffror som tjänar till att uttrycka vektorn vid en given bas, inte vektorn som sådan. De är också beroende av den valda basen.
Slutligen, efter satsen, vektorn W skulle uttryckas enligt följande:
W = (18/5) v1 + (1/5) v2 + v3
Med: v1 =; v2 =; v3 =, Det vill säga basvektorerna B.
Referenser
- Larson, r. Grunder i linjär algebra. Sjätte. Utgåva. Cengage Learning.
- Larson, r. 2006. Beräkning. 7th. Utgåva. Volym 2. McGraw Hill.
- Salas, J. linjär algebra. Ämne 10. Ortonormala baser. Återhämtat sig från: ocw.Uc3m.är.
- Sevilla universitet. Cylindriska koordinater. Vektorbas. Återhämtat sig från: Laplace.oss.är.
- Wikipedia. Ortonormal bas. Återhämtad från: är.Wikipedia.org.
- « Fehling -reaktionsförberedelser, aktiva medel, exempel, användningar
- Newtons andra lagapplikationer, experiment och övningar »