

Gratis vektorer egenskaper, exempel, övningar
- 1252
- 152
- Prof. Erik Johansson
De fria vektorer De är de som är fullständigt specificerade efter deras storlek, deras riktning och deras betydelse, utan att det är nödvändigt att indikera en tillämpningspunkt eller ett visst ursprung.
Eftersom oändliga vektorer kan dras på detta sätt är en fri vektor inte en unik enhet, utan en uppsättning parallella och identiska vektorer som är oberoende av den plats där de är belägna.
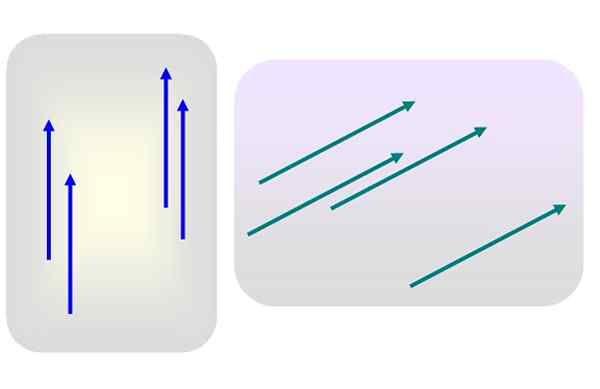
Figur 1. Olika fria vektorer. Källa: Självgjord. Låt oss säga att det finns flera vektorer av storlek 3 riktade vertikalt upp, eller storlek 5 och benägen till höger, som i figur 1.
Ingen av dessa vektorer tillämpas specifikt på någon punkt. Då är någon av de blå eller gröna vektorerna representativa för deras respektive grupp, eftersom dess egenskaper - modul, riktning och känsla - inte är modifierad alls när de överförs till en annan plats i planet.
En fri vektor betecknas vanligtvis i tryckt text med en liten och djärv bokstav, till exempel v. Eller med små bokstäver och en pil på toppen om det är en manuskripttext.
[TOC]
Exempel
Fördelen som fria vektorer har är att de kan flyttas med plan eller utrymme och underhålla sina egenskaper, eftersom alla representanter för uppsättningen är lika giltig.
Det är därför som fysik och mekanik ofta används. Till exempel för att indikera den linjära hastigheten för ett fast ämne som rör sig är det inte nödvändigt att välja en viss punkt i objektet. Sedan uppträder hastighetsvektorn som en fri vektor.
Ett annat exempel på fri vektor är paret av krafter. En par Den består av två krafter med lika stor storlek och riktning, men av motsatta sinnen, appliceras i olika punkter av ett fast ämne. Effekten av ett par är inte att överföra objektet, utan att orsaka rotation tack vare ögonblick producerad.
Figur 2 visar ett par krafter som appliceras på en ratt. Genom krafter F1 och F2, Vridmomentet som vänder ratten runt mitten är skapad och i ett schema.
Det kan tjäna dig: Boron Nitride (BN): Struktur, egenskaper, erhållning, användning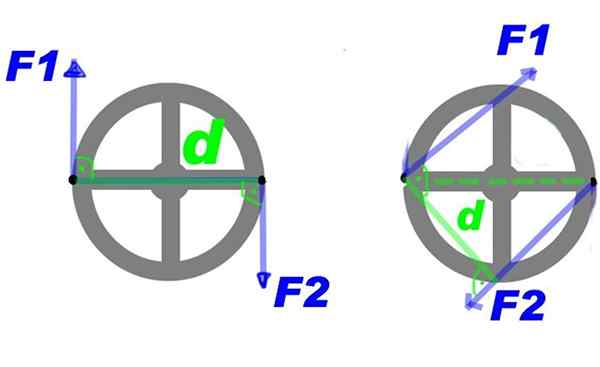 figur 2. Ett par krafter som appliceras på en ratt ger en poängsurn. Källa: Bensko [Public Domain].
figur 2. Ett par krafter som appliceras på en ratt ger en poängsurn. Källa: Bensko [Public Domain]. Du kan göra några förändringar på paret och fortsätta att få samma roterande effekt, till exempel öka kraften, men minska avståndet mellan dem. Eller upprätthålla styrka och avstånd, men applicera paret på ytterligare ett par punkter på ratten, det vill säga vrid vridmomentet runt mitten.
Tiden för kraften eller helt enkelt par, Det är en vektor vars modul är Fd och är vinkelrätt mot hjulplanet vinkelrätt. I exemplet som visas i konventionen är tidsvängningen negativ mening.
Egenskaper och egenskaper
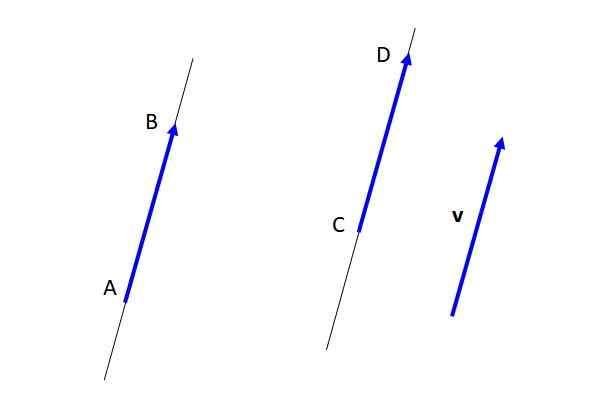
Till skillnad från den fria vektorn V, vektorerna Ab och CD De är fixerade (se figur 3), eftersom de har angett utgångspunkt och ankomstpunkt. Men att vara utrustning med varandra och i sin tur med vektorn v, De är representativa för den fria vektorn v.
 Figur 3. Gratis vektorer, utrustning och fasta vektorer. Källa: Självgjord.
Figur 3. Gratis vektorer, utrustning och fasta vektorer. Källa: Självgjord. De viktigaste egenskaperna för fria vektorer är följande:
-Valfri vektor Ab (Se figur 2) Det är, som sagt, representativt för den fria vektorn v.
-Modulen, riktningen och betydelsen är densamma i alla gratis vektorrepresentant. I figur 2, vektorerna Ab och CD De representerar den fria vektorn v Och de är utrustning.
-Med tanke på en punkt P i rymden är det alltid möjligt att hitta en gratis vektorrepresentant v vars ursprung är i P och nämnda representant är unikt. Detta är den viktigaste egenskapen hos fria vektorer och den som gör dem så mångsidiga.
Kan tjäna dig: Europa (satellit): egenskaper, komposition, bana, rörelse-En voyed fri vektor betecknas som 0 Och det är uppsättningen av alla vektorer som saknar storlek, riktning och mening.
-Om vektorn Ab representerar den fria vektorn v, Sedan vektorn Ba representerar den fria vektorn -v.
-Notation kommer att användas V3 för att utse uppsättningen av alla rymdfria vektorer och V2 För att utse alla fria vektorer i planet.
Löst övningar
Med gratis vektorer kan du utföra följande operationer:
-Tillägg
-Subtraktion
-Multiplikation av klättring av en vektor
-Skalprodukt mellan två vektorer.
-Korsprodukt mellan två vektorer
-Linjär kombination av vektorer
Och mer.
-Övning 1
En student avser att simma från en punkt på stranden från en flod till en annan som är just framför. För att uppnå ingenting direkt med en hastighet av 6 km / h, i vinkelrätt riktning, men strömmen har en hastighet på 4 km / h som avleder den.
Beräkna hastigheten till följd av simmare och hur mycket som avleds av strömmen.
Lösning
Swimmers utökningshastighet är vektorsumman av dess hastighet (med avseende på floden, ritad vertikalt uppåt) och flodens hastighet (ritad från vänster till höger), som utförs som anges i figuren nedan:
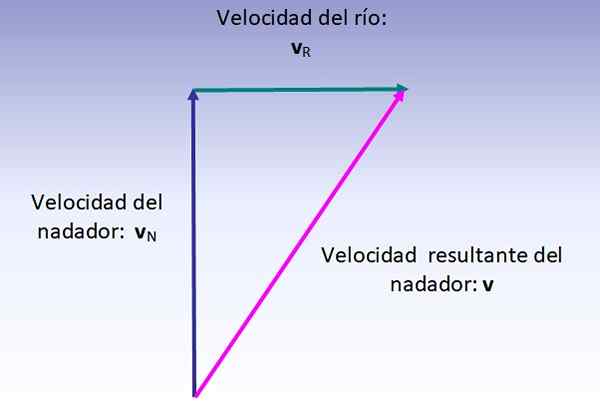
Storleken på den resulterande hastigheten motsvarar hypotenusen av den högra triangeln som visas därför:
V = (62 + 42) ½ km/h = 7.2 km/h
Adressen kan beräknas med vinkel med avseende på vinkelrätt mot stranden:
α = Arctg (4/6) = 33.7: e eller 56.3: e angående stranden.
Övning 2
Hitta tiden för paret av krafter som visas i figuren:
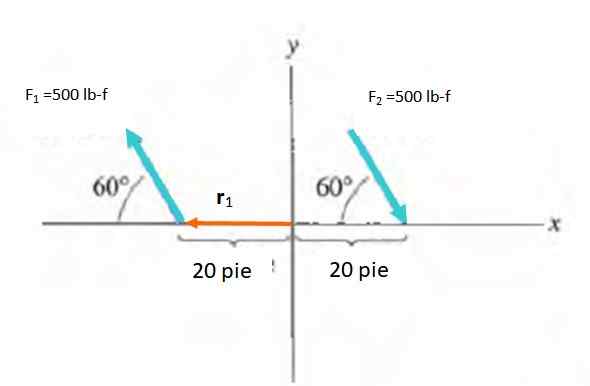
Lösning
Ögonblicket beräknas av:
Kan tjäna dig: inelastiska chocker: i en dimension och exempelM = r x F
Ögonblickens enheter är LB-F.fot. Eftersom vridmomentet är i skärmens plan riktas ögonblicket vinkelrätt mot den, antingen utåt eller inåt.
Eftersom exemplets vridmoment tenderar att vända objektet på vilket det appliceras (som inte visas i figuren) i ett schema, beaktas detta ögonblick genom att peka inuti skärmen och med ett negativt tecken.
Ögonblickets storlek är m = f.d.synd a, att vara i vinkeln mellan kraften och vektorn r. Du måste välja en punkt för att beräkna ögonblicket, som är en gratis vektor. Referenssystemets ursprung väljs därför r går från o till tillämpningspunkten för varje kraft.
M1 = M2 = -Fdsen60º = -500 . tjugo .Sen 60º lb-f . fot = -8660.3 lb-f . fot
Nettomultet är summan av M1 och M2: -17329.5 lb-f . fot.
Referenser
- Beardon, T. 2011. En introduktion till vektorer. Återhämtat sig från: nrich.Matte.org.
- Bedford, 2000. TILL. Mekanik för teknik: statisk. Addison Wesley. 38-52.
- Figueroa, D. Serie: Physics for Science and Engineering. Volym 1. Kinematik.31-68.
- Fysisk. Modul 8: Vektorer. Återhämtat sig från: frtl.Utn.Edu.ar
- Hibbeler, R. 2006. Mekanik för ingenjörer. Statisk. Sjätte upplagan. Continental Editor Company. 15-53.
- Tilläggskalkylatorvektor. Återhämtat sig från: 1728.org
- Vektorer. Återhämtat sig från: det är.Wikibooks.org